Geospatial Services

LiDAR
LiDAR is an acronym of “light detection and ranging” or “laser imaging, detection, and ranging”. It essentially determines the range to a surface using a laser and measuring the time for the reflected light to return to the receiver. Also called 3-D laser scanning, LiDAR has terrestrial, airborne, and mobile applications.
Although Lidar is used in a variety of industries, in the discipline of aerial survey and mapping, LiDAR is commonly described as airborne laser swath mapping (ALSM), and is used to make digital 3D representations of areas on the Earth’s surface. Large powerful airborne LiDAR sensors can be mounted in aircraft for wide area mapping from higher altitudes or smaller compact LiDAR sensors can be mounted on UAV’s for specific detailed site surveys of terrain and infrastructure. Drone surveys are less impacted by weather conditions.
")
LiDAR DATA
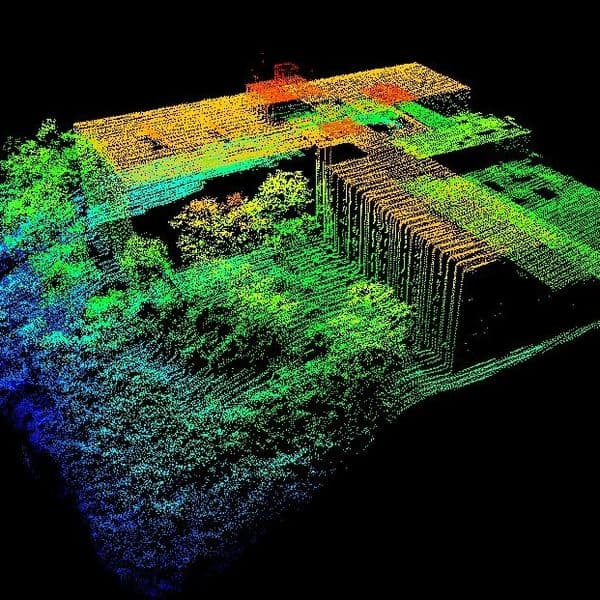
A common term for LiDAR data is ‘Point Cloud’ because the data being recorded from the sensor is a pattern of points collected at very close intervals, whereby each point has a x,y,z coordinate. The data is post processed to ensure positional consistency and then classified. Point classification can entail ground points from non-ground points for terrain mapping, or more detailed classification to map other features.
Photogrammetry
Photogrammetry is the science and technology of obtaining reliable information about physical objects and the environment through the process of recording, measuring and interpreting photographic images.
The term photogrammetry was coined in 1867, by the Prussian architect Albrecht Meydenbauer.
There are many variants of photogrammetry. One example is the extraction of three-dimensional measurements from two-dimensional data (i.e. images). Digital image capturing and photogrammetric processing involves several well defined stages, which allow the generation of 2D or 3D digital models of the object, thereby creating an accurate representation or digital twin of the object.
An extension of this science is stereophotogrammetry, enabling experienced technicians to view the imagery in 3D and accurately interpret, measure and digitize specific features from the 3D imagery.

")
Photogrammetric Data
Photogrammetric data can be complemented with range data from other techniques. Photogrammetry can be more accurate in the x and y direction while range data are generally more accurate in the z direction. One example of range data is lidar or laser scanners which uses returns x, y, z coordinates for multiple discrete points (commonly called “point clouds”). Photos can clearly define the edges of buildings when the point cloud footprint can not. It is beneficial to incorporate the advantages of both systems and integrate them to create a better product.
A 3D visualization can be created by georeferencing the aerial photos and LiDAR data in the same reference frame, orthorectifying the aerial photos, and then draping the orthorectified images on top of the LiDAR grid. It is also possible to create digital terrain models and thus 3D visualization’s using pairs (or multiples) of aerial photographs or satellite.
Photogrammetry also enables mapping and creation of digital twins using historical photographs, which can be very helpful for change detection projects.